Cv2.MatchShapes 是 OpenCV 中**形状相似度对比、目标识别、轮廓匹配**的核心函数,专门用于计算两个轮廓(或形状)之间的相似程度。它的核心作用是:基于轮廓的 Hu 不变矩(Hu Moments),通过特定算法量化两个形状的差异,返回一个相似度数值——数值越小,两个形状越相似,数值接近0时,两个形状基本一致。
它是前序函数(Cv2.FindContours、Cv2.ApproxPolyDP)的“终极应用工具”:Cv2.FindContours 提取轮廓,Cv2.ApproxPolyDP 简化轮廓,而 Cv2.MatchShapes 则完成轮廓的相似度对比,三者结合可实现完整的“轮廓提取→简化→匹配”流程,广泛应用于工业零件质检、模板匹配、手写数字识别、物体分类等场景。
核心特性:Cv2.MatchShapes 具有**平移不变性、旋转不变性、缩放不变性**——即无论两个形状的位置、旋转角度、尺寸大小如何变化,只要形状本身一致,匹配结果就会显示高相似度,这也是它区别于普通像素匹配的核心优势,完全适配实际场景中物体的姿态变化需求。
一、核心一句话理解
Cv2.MatchShapes = 基于 Hu 不变矩,量化两个轮廓(形状)的差异,返回相似度数值(越小越相似),实现形状的平移、旋转、缩放不变性匹配。简单说,它就是“形状对比尺”:不用肉眼判断两个形状是否一致,通过函数返回值就能精准量化相似程度,比如判断两个零件轮廓是否一致、手写数字与模板是否匹配。
二、核心概念(必懂,避免踩坑)
1. 形状匹配(轮廓相似度对比)
形状匹配的核心是“忽略位置、旋转、缩放的影响,只对比形状本身的轮廓特征”。Cv2.MatchShapes 不直接对比轮廓的像素坐标,而是通过提取轮廓的“Hu 不变矩”这一抽象特征,将形状转化为可量化的数值,再通过特定公式计算两个特征之间的差异,最终得到相似度结果。
与像素匹配的区别:像素匹配要求两个轮廓的位置、尺寸、角度完全一致,而 Cv2.MatchShapes 不受这些因素影响,只要形状轮廓一致,就能得到高相似度,更贴合实际应用场景(如零件摆放角度不同、尺寸按比例缩放)。
2. Hu 不变矩(核心底层特征)
Hu 不变矩是由美国科学家 Hu M.K. 提出的一组特征量,由图像的二阶、三阶中心矩推导而来,共包含7个不变量,核心特性是“对平移、旋转、缩放变换具有不变性”,是形状识别、相似度对比的核心底层依据,也是 Cv2.MatchShapes 函数的核心原理支撑。
核心原理:无论轮廓如何平移(移动位置)、旋转(改变角度)、缩放(放大/缩小),其 Hu 不变矩的数值基本保持不变;而不同形状的轮廓,其 Hu 不变矩数值会存在明显差异。Cv2.MatchShapes 正是通过计算两个轮廓的 Hu 不变矩差异,来判断形状相似度。
补充说明:Hu 不变矩的原始数值动态范围极大(如从10⁻⁷到10⁻²⁰),因此 Cv2.MatchShapes 内部会对 Hu 不变矩进行对数转换($$m_i = sign(h_i) \cdot \log|h_i|$$,其中$$h_i$$为原始 Hu 不变矩),将数值映射到同一量级,避免因数值差异过大导致的计算误差。
3. 相似度数值(返回值解读)
Cv2.MatchShapes 的返回值是一个非负实数(double 类型),核心解读规则如下(实战必记):
- 返回值 ≈ 0:两个轮廓的形状基本完全一致,差异极小;
- 0 < 返回值 ≤ 0.1:两个轮廓高度相似,细微差异(如微小毛刺、轻微变形)可忽略;
- 0.1 < 返回值 ≤ 1.0:两个轮廓有一定相似性,但存在明显差异(如形状略有变形、局部缺失);
- 返回值 > 1.0:两个轮廓相似度极低,形状差异显著(如圆形与矩形)。
注意:返回值没有固定上限,差异越大,数值越大,实战中需根据具体场景设定相似度阈值(如工业质检中,阈值设为0.05,小于该值则判定为合格)。
4. 与前序函数的关联(核心流程)
Cv2.MatchShapes 无法直接处理原始图像,必须依赖前序函数提取的轮廓,完整流程如下,也是实战中最常用的组合:
图像预处理(灰度化→去噪→二值化)→ Cv2.FindContours(提取轮廓)→ Cv2.ApproxPolyDP(简化轮廓,过滤噪声)→ Cv2.MatchShapes(相似度对比)
关联说明:Cv2.FindContours 提取的原始轮廓可能包含冗余点,Cv2.ApproxPolyDP 简化后可减少噪声干扰,让 Hu 不变矩的计算更精准,从而提升 Cv2.MatchShapes 的匹配精度。
三、Cv2.MatchShapes 算法原理(简化理解)
Cv2.MatchShapes 的底层算法基于 Hu 不变矩的差异计算,核心流程分为4步,无需手动干预,函数内部自动完成所有计算,逻辑简洁且高效:
1. 轮廓预处理(函数内部自动执行)
对输入的两个轮廓(contour1、contour2)进行简单预处理,确保轮廓点按顺序排列(顺时针或逆时针),同时过滤点数量过少的无效轮廓(少于3个点无法计算 Hu 不变矩)。
2. 计算 Hu 不变矩
分别计算两个轮廓的7个 Hu 不变矩,具体步骤为:先计算轮廓的几何矩、中心矩,再由中心矩推导得到7个 Hu 不变矩,最后对每个 Hu 不变矩进行对数转换,将数值映射到同一量级,便于后续差异计算。
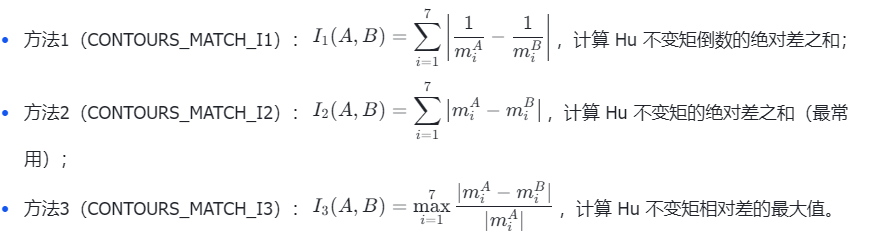
3. 按指定方法计算差异(核心步骤)
根据用户指定的“匹配方法(method)”,计算两个轮廓的 Hu 不变矩(对数转换后)之间的差异,三种常用方法对应不同的计算公式,核心是通过求和或求最大值的方式,量化 Hu 不变矩的整体差异,具体公式如下(设A、B分别为两个轮廓的对数转换后 Hu 不变矩):
4. 输出相似度数值
将第三步计算得到的差异值,作为最终的相似度返回值——差异值越小,说明两个轮廓的 Hu 不变矩越接近,形状相似度越高;反之,差异值越大,相似度越低。
四、函数原型(C# OpenCVSharp,3种常用重载,重点掌握)
Cv2.MatchShapes 有3种重载形式,适用于不同的输入轮廓格式,核心参数一致,日常开发中重点掌握前两种,尤其是第二种(最常用),适配 Cv2.FindContours 提取的轮廓格式。
1. 重载1(输入为 InputArray,最基础)
double Cv2.MatchShapes(
InputArray contour1, // 第一个输入轮廓/灰度图
InputArray contour2, // 第二个输入轮廓/灰度图
ShapeMatchModes method, // 形状匹配方法(核心参数)
double parameter = 0 // 方法特定参数(目前未支持,默认设为0)
);2. 重载2(输入为 IEnumerable<Point>,最常用)
double Cv2.MatchShapes(
IEnumerable<Point> contour1, // 第一个输入轮廓(单个轮廓,Point数组)
IEnumerable<Point> contour2, // 第二个输入轮廓(单个轮廓,Point数组)
ShapeMatchModes method, // 形状匹配方法(核心参数)
double parameter = 0 // 方法特定参数(默认设为0)
);3. 重载3(输入为 IEnumerable<Point2f>,高精度场景)
double Cv2.MatchShapes(
IEnumerable<Point2f> contour1, // 第一个输入轮廓(浮点型坐标,高精度)
IEnumerable<Point2f> contour2, // 第二个输入轮廓(浮点型坐标,高精度)
ShapeMatchModes method, // 形状匹配方法(核心参数)
double parameter = 0 // 方法特定参数(默认设为0)
);核心说明:3种重载的核心逻辑完全一致,仅输入的轮廓格式不同。重载2最常用,因为 Cv2.FindContours 输出的轮廓是 Point[][] 类型,单个轮廓是 Point[],可直接作为输入;重载3适用于亚像素级高精度匹配(如工业精细质检);重载1可直接输入灰度图,但精度较低,日常极少使用。
补充:参数 parameter 目前未被任何匹配方法支持,无论哪种场景,均设为0即可,无需调整。
五、参数逐字详解(核心重点,决定匹配精度)
Cv2.MatchShapes 的参数不多,但 contour1、contour2 的输入规范和 method 的选择,直接决定匹配结果的准确性,下面逐一看懂每个参数的作用、取值范围和注意事项。
1. contour1 / contour2(输入轮廓,必选)
- 类型:根据重载不同,可分为 InputArray、IEnumerable<Point>、IEnumerable<Point2f>;
- 核心要求:
- 必须是“单个轮廓”(Cv2.FindContours 输出的 contours[i],而非整个 contours 二维数组),不能直接输入 contours 集合;
- 轮廓必须是闭合的(如物体轮廓),开放轮廓(如线段)的匹配结果会失真,因为开放轮廓无法计算完整的 Hu 不变矩;
- 轮廓点数量需 ≥3 个,否则无法计算 Hu 不变矩,函数会报错或返回异常值;
- 来源:通常来自 Cv2.FindContours 提取、Cv2.ApproxPolyDP 简化后的轮廓,也可手动创建的闭合轮廓点集。
- 注意事项:
- 两个轮廓的坐标类型需一致(均为 Point 或均为 Point2f),否则会报错;
- 建议提前对轮廓进行简化(Cv2.ApproxPolyDP)和去噪处理,避免轮廓上的微小毛刺影响 Hu 不变矩计算,导致匹配精度下降;
- 若输入为灰度图(重载1),需确保图像为二值化灰度图(仅含0和255像素),否则会影响轮廓特征提取。
2. method(形状匹配方法,核心调参参数)
决定 Hu 不变矩差异的计算方式,取值为 ShapeMatchModes 枚举,共3种常用方法,无默认值,必须手动指定,日常开发中可根据场景选择,具体对比如下(重点记常用方法):
| 匹配方法 | 核心计算逻辑 | 特点 | 适用场景 |
|---|---|---|---|
ShapeMatchModes.ContoursMatchI1 | 计算两个轮廓 Hu 不变矩(对数转换后)倒数的绝对差之和 | 对 Hu 不变矩的微小差异敏感,匹配精度较高,但易受极端值影响 | 高精度形状匹配(如精细零件质检、模板精准匹配) |
ShapeMatchModes.ContoursMatchI2 | 计算两个轮廓 Hu 不变矩(对数转换后)的绝对差之和 | 平衡精度与稳定性,对噪声和微小变形的容忍度适中,计算速度快 | 常规场景(如物体识别、手写数字匹配、普通零件分类),最常用 |
ShapeMatchModes.ContoursMatchI3 | 计算两个轮廓 Hu 不变矩(对数转换后)相对差的最大值 | 对轮廓的局部显著差异敏感,能快速识别形状的明显变形 | 粗匹配、快速筛选(如快速区分不同类型的物体,排除明显不匹配的轮廓) |
经验总结:日常开发中,优先使用 ContoursMatchI2,若需要更高精度,可尝试 ContoursMatchI1;若只需快速筛选,可使用 ContoursMatchI3。
3. parameter(方法特定参数,可选)
- 类型:double,默认值为 0;
- 核心说明:目前 OpenCV 所有版本中,该参数均未被任何匹配方法支持,无论选择哪种 method,都无需调整该参数,固定设为 0 即可;
- 注意:不可随意修改该参数(如设为非0值),否则会导致匹配结果异常,无任何实际意义。
六、最常用参数组合(直接复制使用,适配80%场景)
结合 Cv2.FindContours、Cv2.ApproxPolyDP 提取的轮廓,以下组合是日常开发中最常用的,适配不同场景,无需反复调参,高效稳定。
1. 常规场景(物体识别、普通零件匹配,最常用)
// 假设 contours1、contours2 是两个图像提取的轮廓集合
// 取两个图像的最大轮廓(避免小噪声轮廓干扰)
Point[] contour1 = contours1.OrderByDescending(c => Cv2.ContourArea(c)).First();
Point[] contour2 = contours2.OrderByDescending(c => Cv2.ContourArea(c)).First();
// 轮廓简化(过滤噪声,提升匹配精度)
double perimeter1 = Cv2.ArcLength(contour1, closed: true);
double epsilon1 = 0.02 * perimeter1;
Point[] approx1 = Cv2.ApproxPolyDP(contour1, epsilon1, closed: true);
double perimeter2 = Cv2.ArcLength(contour2, closed: true);
double epsilon2 = 0.02 * perimeter2;
Point[] approx2 = Cv2.ApproxPolyDP(contour2, epsilon2, closed: true);
// 形状匹配(常规方法,平衡精度与速度)
double similarity = Cv2.MatchShapes(
contour1: approx1,
contour2: approx2,
method: ShapeMatchModes.ContoursMatchI2,
parameter: 0
);
// 相似度判断(阈值可根据场景调整,此处设为0.1)
if (similarity <= 0.1)
{
Console.WriteLine("两个形状高度相似");
}
else
{
Console.WriteLine("两个形状差异较大");
}2. 高精度场景(精细零件质检、模板精准匹配)
// 高精度轮廓(浮点型坐标)
Point2f[] contour1F = approx1.Select(p => (Point2f)p).ToArray();
Point2f[] contour2F = approx2.Select(p => (Point2f)p).ToArray();
// 高精度匹配方法
double similarity = Cv2.MatchShapes(
contour1: contour1F,
contour2: contour2F,
method: ShapeMatchModes.ContoursMatchI1,
parameter: 0
);
// 高精度阈值(更严格,此处设为0.05)
if (similarity <= 0.05)
{
Console.WriteLine("零件合格(形状完全一致)");
}
else
{
Console.WriteLine("零件不合格(形状存在变形)");
}3. 快速筛选场景(粗匹配,排除明显不匹配轮廓)
// 无需轮廓简化(快速计算,牺牲部分精度)
double similarity = Cv2.MatchShapes(
contour1: contour1,
contour2: contour2,
method: ShapeMatchModes.ContoursMatchI3,
parameter: 0
);
// 粗匹配阈值(宽松,此处设为1.0)
if (similarity <= 1.0)
{
Console.WriteLine("形状可能匹配,进入下一步精准匹配");
}
else
{
Console.WriteLine("形状完全不匹配,直接排除");
}七、完整可运行代码(适配 OpenCV 4.x+,直接复制)
核心流程:读取两张图像(模板图+测试图)→ 预处理(灰度化→去噪→二值化)→ 轮廓提取→ 轮廓简化→ 形状匹配→ 显示匹配结果+相似度数值,注释详细,可直接替换图像路径使用,贴合实战中的“模板匹配”场景。
using OpenCvSharp;
using System;
using System.Linq;
namespace MatchShapesDemo
{
class Program
{
static void Main(string[] args)
{
// 1. 读取图像(模板图:已知形状;测试图:待匹配形状)
Mat templateImg = Cv2.ImRead("template.jpg", ImreadModes.Color); // 模板图
Mat testImg = Cv2.ImRead("test.jpg", ImreadModes.Color); // 测试图
if (templateImg == null || templateImg.Empty() || testImg == null || testImg.Empty())
{
Console.WriteLine("图像读取失败,请检查路径!");
return;
}
// 2. 预处理:灰度化 → 高斯去噪 → 二值化(轮廓提取的前提)
// 模板图预处理
Mat templateGray = new Mat();
Cv2.CvtColor(templateImg, templateGray, ColorConversionCodes.BGR2GRAY);
Mat templateBlurred = new Mat();
Cv2.GaussianBlur(templateGray, templateBlurred, new Size(3, 3), 0);
Mat templateBinary = new Mat();
// 二值化:前景(物体)为白色(255),背景为黑色(0),反转确保前景正确
Cv2.Threshold(templateBlurred, templateBinary, 127, 255, ThresholdTypes.BinaryInv);
// 测试图预处理(与模板图预处理步骤完全一致,确保特征统一)
Mat testGray = new Mat();
Cv2.CvtColor(testImg, testGray, ColorConversionCodes.BGR2GRAY);
Mat testBlurred = new Mat();
Cv2.GaussianBlur(testGray, testBlurred, new Size(3, 3), 0);
Mat testBinary = new Mat();
Cv2.Threshold(testBlurred, testBinary, 127, 255, ThresholdTypes.BinaryInv);
// 3. 提取轮廓(只检测最外层轮廓,避免内层轮廓干扰)
// 模板图轮廓提取
Cv2.FindContours(
image: templateBinary,
contours: out Point[][] templateContours,
hierarchy: out Mat templateHierarchy,
mode: RetrievalModes.External,
method: ContourApproximationModes.ApproxNone
);
// 测试图轮廓提取
Cv2.FindContours(
image: testBinary,
contours: out Point[][] testContours,
hierarchy: out Mat testHierarchy,
mode: RetrievalModes.External,
method: ContourApproximationModes.ApproxNone
);
// 4. 筛选有效轮廓(排除点数量过少的噪声轮廓,至少3个点)
Point[] templateContour = templateContours.Where(c => c.Length >= 3).OrderByDescending(c => Cv2.ContourArea(c)).FirstOrDefault();
Point[] testContour = testContours.Where(c => c.Length >= 3).OrderByDescending(c => Cv2.ContourArea(c)).FirstOrDefault();
if (templateContour == null || testContour == null)
{
Console.WriteLine("未检测到有效轮廓,无法进行匹配!");
return;
}
// 5. 轮廓简化(过滤噪声毛刺,提升匹配精度)
// 模板图轮廓简化
double templatePerimeter = Cv2.ArcLength(templateContour, closed: true);
double templateEpsilon = 0.02 * templatePerimeter;
Point[] templateApprox = Cv2.ApproxPolyDP(templateContour, templateEpsilon, closed: true);
// 测试图轮廓简化
double testPerimeter = Cv2.ArcLength(testContour, closed: true);
double testEpsilon = 0.02 * testPerimeter;
Point[] testApprox = Cv2.ApproxPolyDP(testContour, testEpsilon, closed: true);
// 6. 核心:形状匹配(常规场景,最常用参数组合)
double similarity = Cv2.MatchShapes(
contour1: templateApprox,
contour2: testApprox,
method: ShapeMatchModes.ContoursMatchI2,
parameter: 0
);
// 7. 匹配结果判断与可视化
string matchResult = similarity<= 0.1 ? "高度相似(匹配成功)" : "差异较大(匹配失败)";
Scalar resultColor = similarity <= 0.1 ? new Scalar(0, 255, 0) : new Scalar(0, 0, 255);
// 绘制轮廓(模板图:绿色,测试图:红色)
Mat templateResult = templateImg.Clone();
Cv2.DrawContours(templateResult, new Point[][] { templateApprox }, -1, new Scalar(0, 255, 0), 2);
Cv2.PutText(templateResult, "模板轮廓", new Point(10, 30), HersheyFonts.HersheySimplex, 1, new Scalar(0, 255, 0), 2);
Mat testResult = testImg.Clone();
Cv2.DrawContours(testResult, new Point[][] { testApprox }, -1, new Scalar(0, 0, 255), 2);
Cv2.PutText(testResult, $"匹配结果:{matchResult}", new Point(10, 30), HersheyFonts.HersheySimplex, 1, resultColor, 2);
Cv2.PutText(testResult, $"相似度:{similarity:F4}", new Point(10, 70), HersheyFonts.HersheySimplex, 1, resultColor, 2);
// 8. 显示+保存结果
Cv2.ImShow("模板图(绿色轮廓)", templateResult);
Cv2.ImShow("测试图(红色轮廓)", testResult);
Cv2.ImWrite("template_result.png", templateResult);
Cv2.ImWrite("test_result.png", testResult);
// 输出详细信息
Console.WriteLine($"模板轮廓顶点数:{templateApprox.Length}");
Console.WriteLine($"测试轮廓顶点数:{testApprox.Length}");
Console.WriteLine($"形状相似度:{similarity:F4}");
Console.WriteLine($"匹配结果:{matchResult}");
// 9. 等待按键,释放资源
Cv2.WaitKey(0);
// 释放所有Mat对象,避免内存泄漏
templateImg.Release();
testImg.Release();
templateGray.Release();
templateBlurred.Release();
templateBinary.Release();
testGray.Release();
testBlurred.Release();
testBinary.Release();
templateHierarchy.Release();
testHierarchy.Release();
templateResult.Release();
testResult.Release();
Cv2.DestroyAllWindows();
}
}
}代码关键说明:
- 预处理一致性:模板图和测试图的预处理步骤必须完全一致(相同的高斯核、二值化阈值),否则会导致轮廓特征差异,影响匹配精度;
- 轮廓筛选:通过
Where(c => c.Length >= 3)过滤无效轮廓,通过OrderByDescending(c => Cv2.ContourArea(c))取最大轮廓,避免小噪声轮廓干扰匹配结果; - 阈值调整:相似度阈值(0.1)可根据场景调整,工业质检可设为0.05(更严格),普通识别可设为0.2(更宽松);
- 可视化:通过绘制轮廓和匹配结果,直观查看两个形状的差异,便于调试和结果验证。
八、Cv2.MatchShapes 的 6 大经典用途
1. 工业零件质检(最常用)
将生产的零件轮廓(测试轮廓)与标准零件轮廓(模板轮廓)进行匹配,通过相似度阈值判断零件是否合格——若相似度低于阈值,说明零件形状无变形、无缺陷;若高于阈值,说明零件存在变形、缺失等问题,适用于齿轮、螺栓、垫片等零件的自动化质检。
2. 模板匹配与目标识别
在复杂图像中,提取所有轮廓,分别与模板轮廓进行匹配,找到相似度最高的轮廓,实现目标识别。例如:在包含多种形状的图像中,找到与“圆形模板”最相似的轮廓,定位圆形物体;在手写数字识别中,将手写数字轮廓与0-9的数字模板轮廓匹配,识别数字。
3. 形状分类
将多个待分类的轮廓,分别与不同类别的模板轮廓(如矩形、三角形、圆形)进行匹配,根据相似度高低,将轮廓分类到对应的形状类别中,适用于物体分类、垃圾分类等场景(如区分圆形瓶盖、矩形盒子、三角形零件)。
4. 图像检索
提取图像中的核心轮廓,与数据库中的图像轮廓进行批量匹配,找到形状相似的图像,适用于图像检索、版权比对等场景(如检索与目标图像形状相似的图片)。
5. 手写/印刷字符识别
将手写或印刷字符的轮廓,与标准字符模板(如字母A-Z、数字0-9)的轮廓进行匹配,通过相似度判断字符类别,是简易字符识别系统的核心步骤。
6. 医学图像分析
在医学图像(如CT、X光图像)中,提取病变区域的轮廓,与正常区域的轮廓进行匹配,通过相似度差异判断病变程度,辅助医生诊断(如肿瘤轮廓与正常组织轮廓的匹配对比)。
九、常见问题与解决方案(必看,避免踩坑)
1. 问题:匹配结果异常(相似度数值过大,明明形状一致却显示不匹配)
原因及解决方案:
- 原因1:预处理不一致(模板图和测试图的二值化阈值、高斯核尺寸不同),导致轮廓特征差异;
- 解决方案:确保模板图和测试图的预处理步骤完全一致,使用相同的高斯核(如3x3)、相同的二值化阈值(如127);
- 原因2:轮廓未简化,噪声毛刺过多,导致 Hu 不变矩计算偏差;
- 解决方案:对两个轮廓都进行 Cv2.ApproxPolyDP 简化,过滤噪声毛刺;
- 原因3:输入的是轮廓集合(contours),而非单个轮廓;
- 解决方案:遍历轮廓集合,取单个轮廓(通常取最大轮廓)进行匹配,不可直接输入 contours 二维数组。
2. 问题:报错“Input contour is invalid”(输入轮廓无效)
原因及解决方案:
- 原因1:轮廓点数量过少(少于3个点),无法计算 Hu 不变矩;
- 解决方案:提前筛选轮廓,过滤点数量 <3 的无效轮廓(如
Where(c => c.Length >= 3)); - 原因2:输入的轮廓是开放轮廓(如线段),无法计算完整的 Hu 不变矩;
- 解决方案:确保输入的轮廓是闭合的,若为开放轮廓,可通过形态学闭运算连接,或重新提取闭合轮廓;
- 原因3:轮廓坐标类型不匹配(如一个是 Point,一个是 Point2f);
- 解决方案:将两个轮廓的坐标类型统一(均转为 Point 或均转为 Point2f)。
3. 问题:形状相似但匹配结果差异大(受平移、旋转、缩放影响)
原因及解决方案:
- 原因1:轮廓存在镜像翻转(如模板轮廓是正的,测试轮廓是翻转的),Hu 不变矩的第7个不变量会发生符号变化,导致差异增大;
- 解决方案:对其中一个轮廓进行镜像翻转(如
Cv2.Flip),再进行匹配,或同时计算翻转前后的相似度,取最小值; - 原因2:轮廓缩放比例过大,且存在严重噪声,导致 Hu 不变矩偏差;
- 解决方案:对轮廓进行归一化处理(缩放至相同尺寸),再进行匹配,同时加强去噪(增大高斯核尺寸)。
4. 问题:匹配速度慢(批量匹配时卡顿)
原因及解决方案:
- 原因1:轮廓点数量过多,未进行简化,导致 Hu 不变矩计算耗时;
- 解决方案:对所有轮廓进行 Cv2.ApproxPolyDP 简化,减少轮廓点数量;
- 原因2:匹配方法选择不当(如使用 ContoursMatchI1,计算量较大);
- 解决方案:批量匹配时,优先使用 ContoursMatchI3(计算速度最快)进行粗筛选,再对筛选后的轮廓使用 ContoursMatchI2 进行精准匹配;
- 原因3:批量匹配的轮廓数量过多,未进行预处理筛选;
- 解决方案:提前按轮廓面积、周长进行筛选,排除明显不匹配的轮廓(如面积差异过大的轮廓),减少匹配次数。
5. 问题:相同形状的匹配结果不稳定(每次运行相似度数值差异大)
原因及解决方案:
- 原因1:图像噪声过多,每次提取的轮廓存在微小差异,导致 Hu 不变矩计算偏差;
- 解决方案:加强去噪处理(如使用5x5高斯核、增加形态学闭运算),确保每次提取的轮廓一致;
- 原因2:轮廓简化的 epsilon 取值不当,导致简化后的轮廓差异较大;
- 解决方案:使用自适应 epsilon(轮廓周长×0.02),避免固定值导致的简化差异;
- 原因3:图像读取时存在失真(如缩放、模糊);
- 解决方案:读取图像时使用
ImreadModes.Unchanged,避免自动缩放和失真。
6. 问题:参数 parameter 设为非0值,匹配结果异常
原因:目前 OpenCV 所有版本均未支持 parameter 参数,非0值会干扰计算逻辑;
解决方案:无论选择哪种匹配方法,都将 parameter 固定设为0,不可随意修改。
十、一句话终极总结
Cv2.MatchShapes = 形状的“相似度量化工具”,基于 Hu 不变矩实现平移、旋转、缩放不变性匹配,核心是通过量化两个轮廓的 Hu 不变矩差异,返回相似度数值(越小越相似),是 Cv2.FindContours、Cv2.ApproxPolyDP 的终极应用,广泛用于工业质检、目标识别、形状分类等场景,只需掌握“轮廓规范输入+匹配方法选择+相似度阈值调整”,就能实现精准的形状匹配。
若文章对您有帮助,可以激励一下我哦,祝您平安幸福!
| 微信 | 支付宝 |
|---|---|
 |
 |